機器人設定
可以設定機器人的常規功能和使用環境。
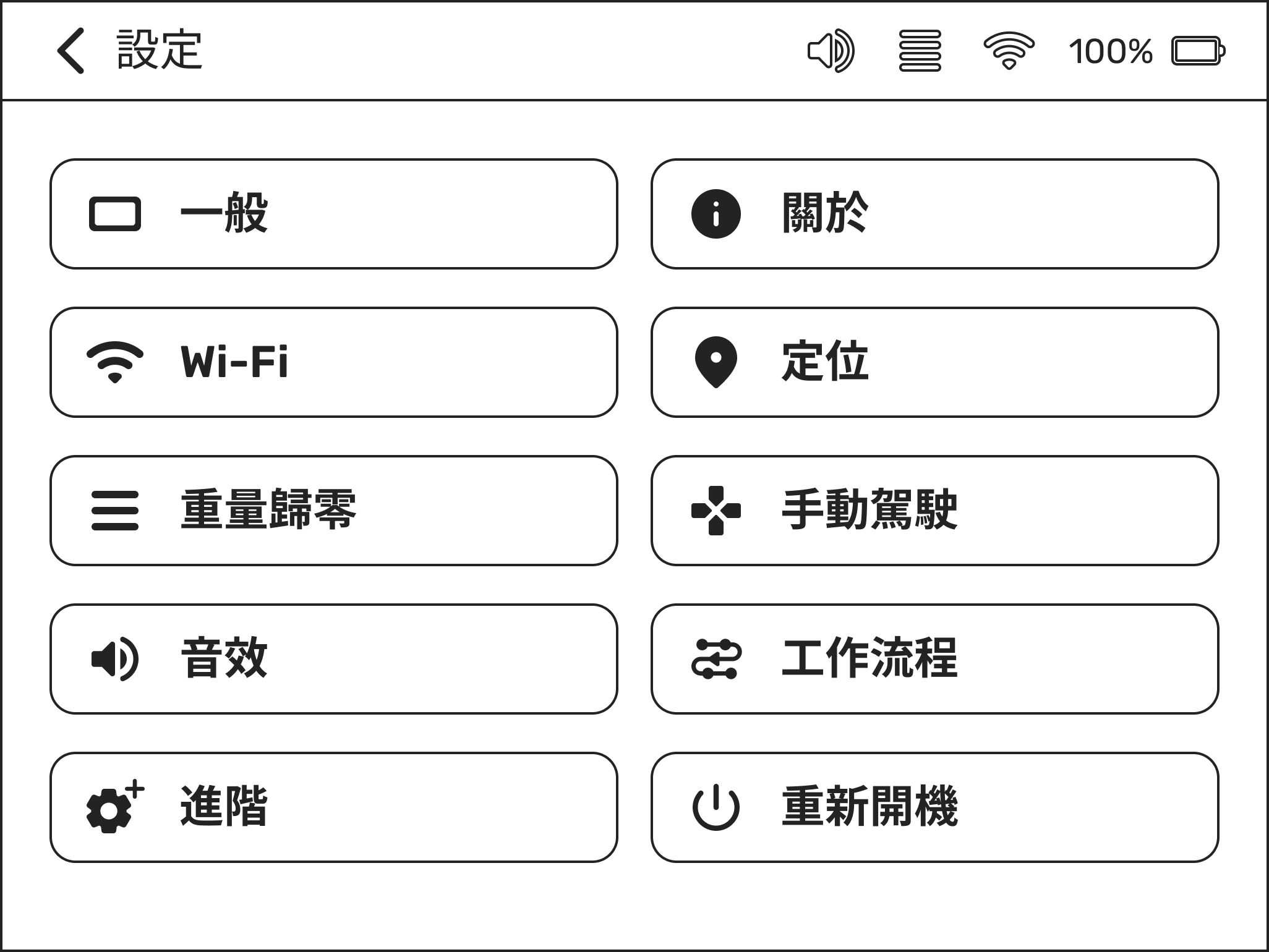
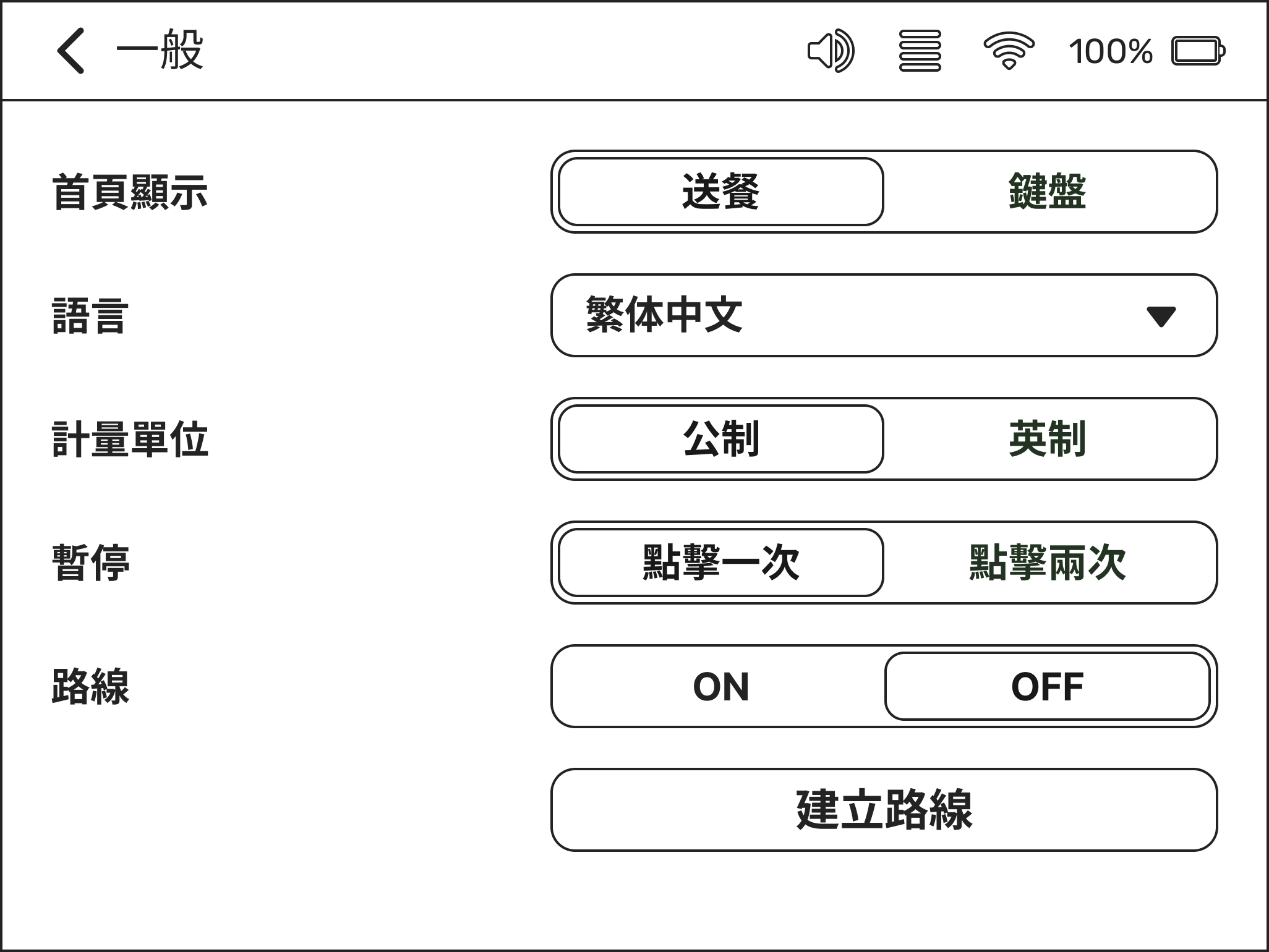
一般
-
設定首頁的顯示方法。
目的地: 顯示目的地。
鍵盤: 顯示數位鍵盤,直接輸入目的地。
-
指定設定的語言。英文、日文、韓文、西班牙文、法文、德文、簡體中文和繁體中文會依序 顯示。
-
設定機器人在移動過程中暫停的方法。
點選一次: 按一下螢幕即可使機器人暫停。
點選兩次: 按兩下螢幕即可使機器人暫停。
-
設定常用路徑。建立路線方法見設定路徑。
關於
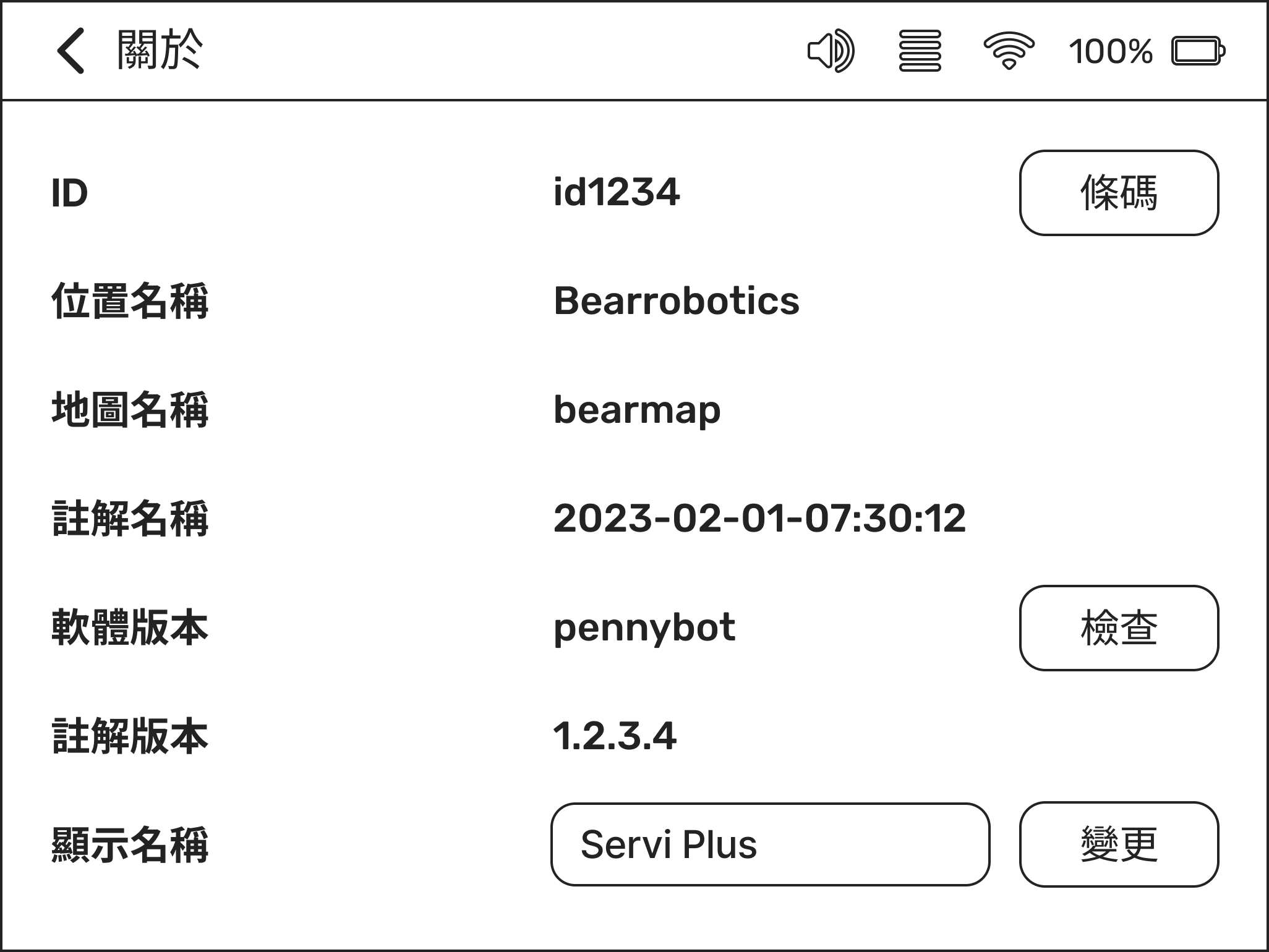
可以查看安裝在機器人上的軟硬體資訊、機器人設定的位置和地圖資訊等詳細資訊。
點擊機器人名稱旁邊的變更,即可修改機器人名稱。
Wi-Fi
可以查看機器人連接的Wi-Fi。請在目錄中點擊要使用的Wi-Fi按鈕,輸入密碼後,點擊連線。

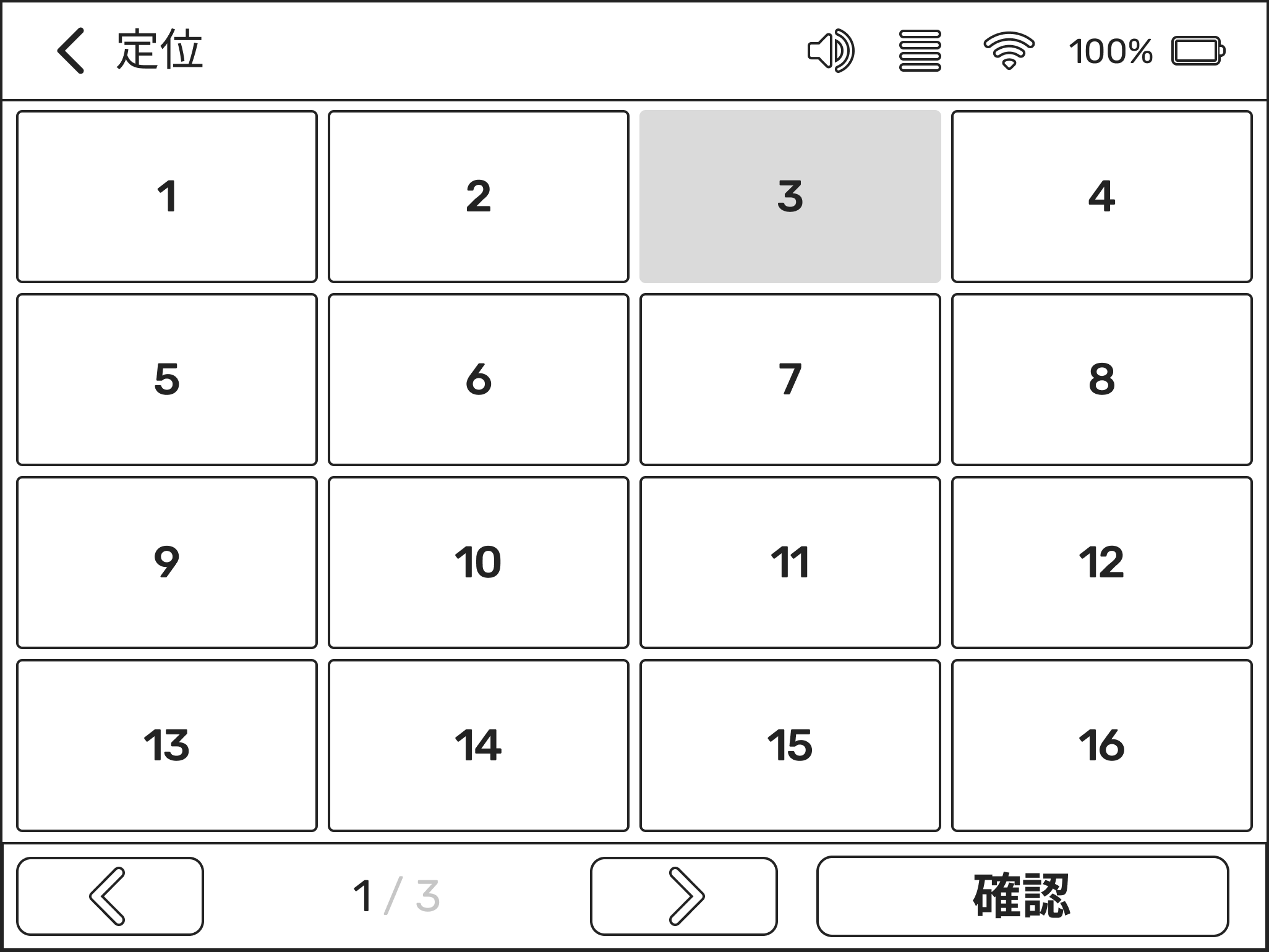
定位
用於重新設定目的地位置。重新分配機器人時,應在目的地根據安裝工程師設定的方向重新分配才能正確分配位置。
首頁中機器人待機位置上長按重新分配的目的地也能重新設定位置。
重量歸零
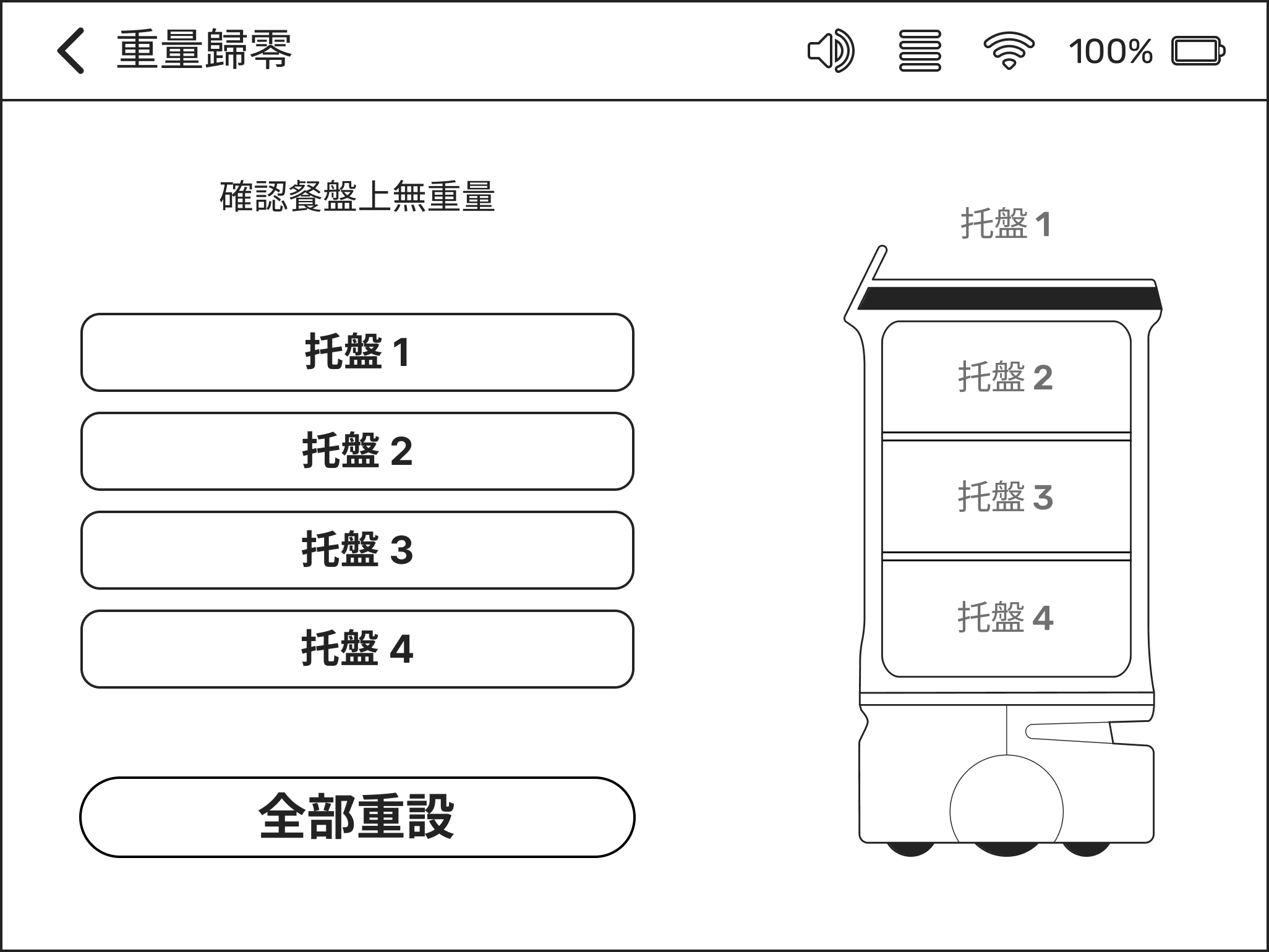
托盤上殘留異物或小餐具時,機器人將其識別為重量,不會移動至下一個目的地。清理乾淨托盤後,如果依然存在相同問題,請初始化重量感測器。
各托盤按鈕:初始化對應托盤的重量。
全部重設:初始化全部托盤的重量。
長按觸控式螢幕頂部狀態列的圖示,也能重置全部托盤的重量。
手動駕駛
可用螢幕中顯示的箭頭手動操作機器人,也可以用手直接推移機器人。另外,機器人的輪子被鎖時,可以用手動操作將機器人移動至指定位置。
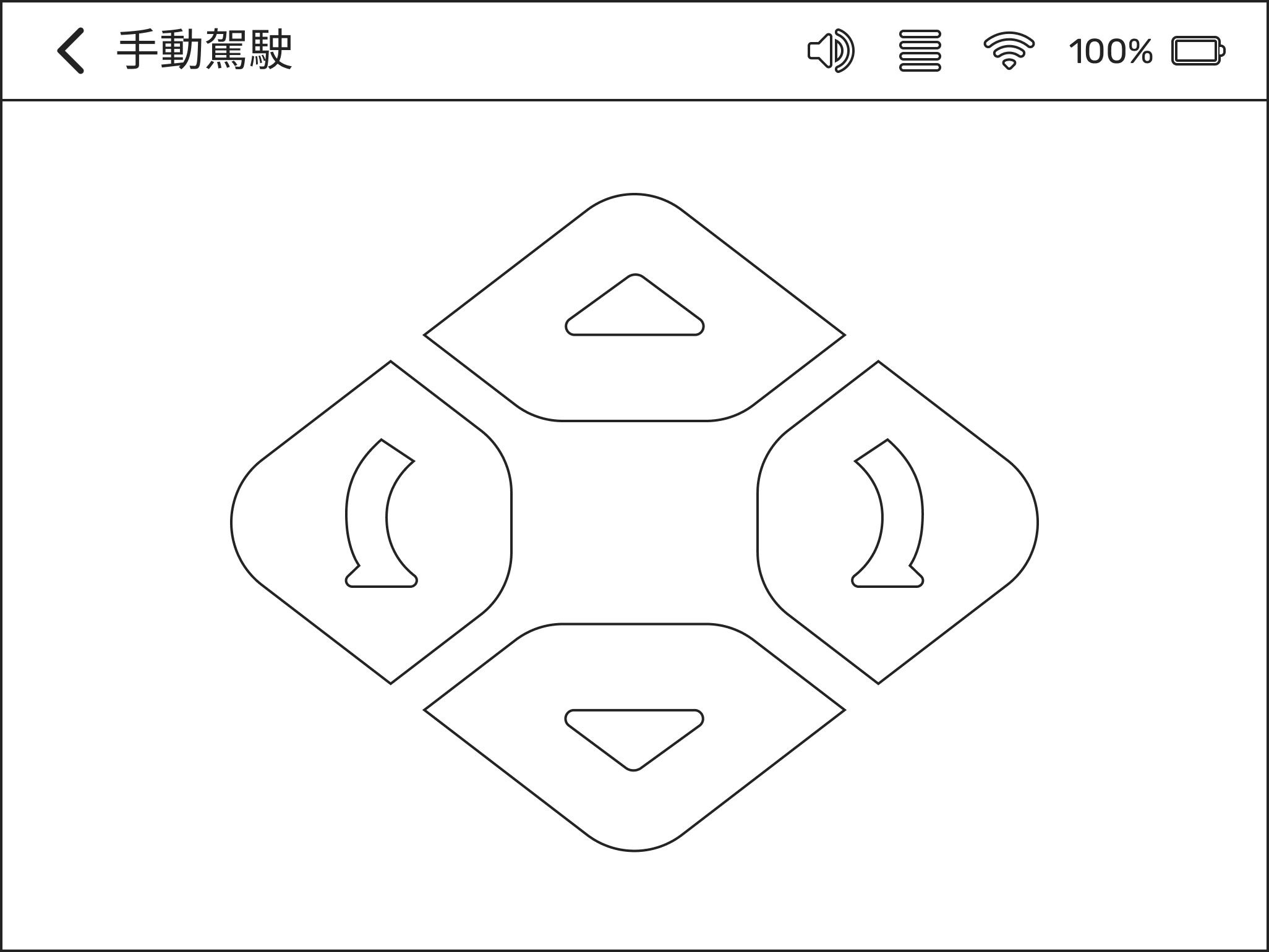
[注意]
用手直接推移機器人時,請勿觸摸托盤部分。可能會導致重量感測器故障。
音效
根據狀況設定音訊。可確認和調整機器人的移動音訊和消息音量。
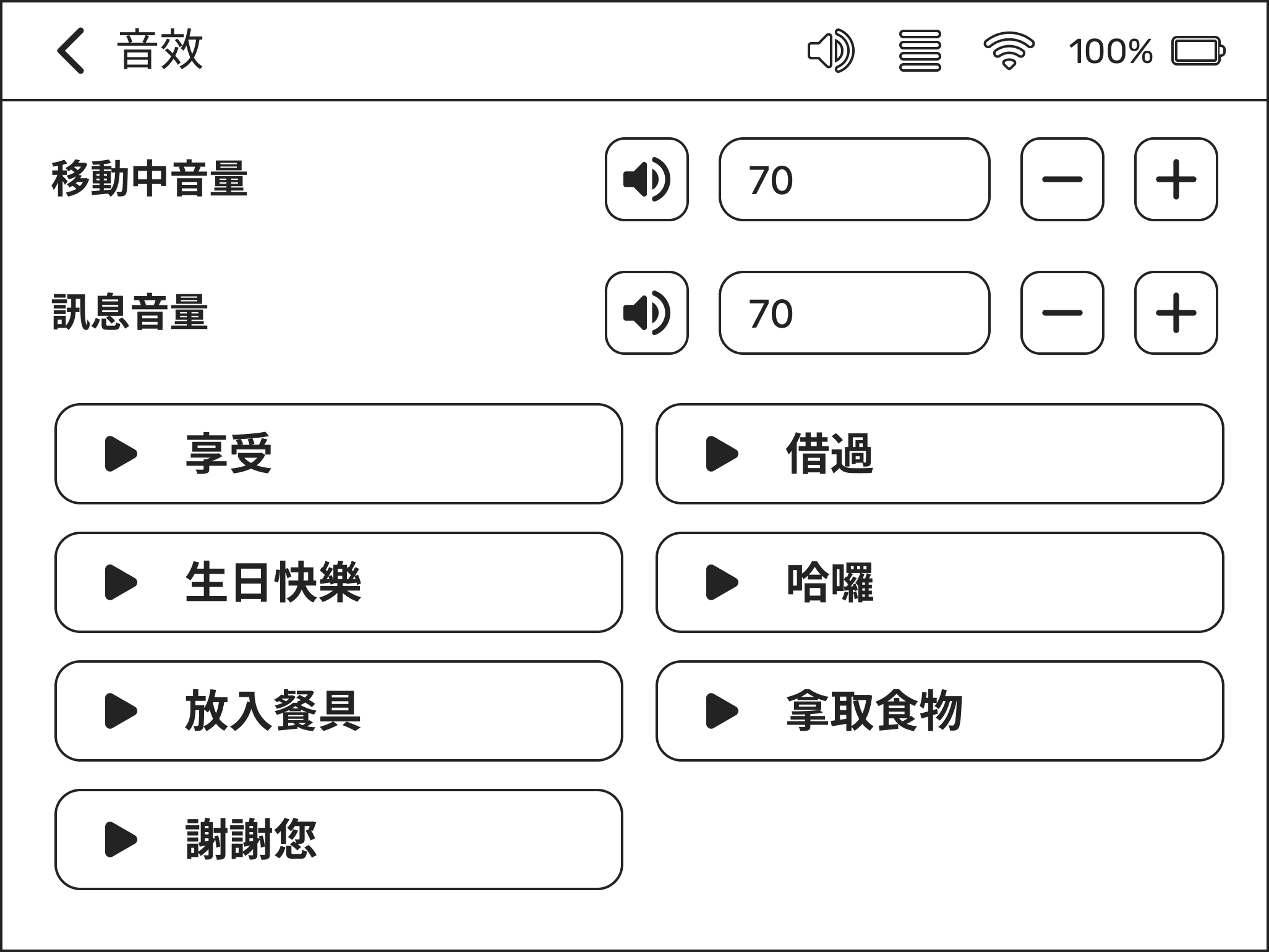
另外,長按觸控式螢幕頂部狀態列的 圖示,將彈出可調節移動音訊和消息音量的視窗。
工作流程
運行設定的詳細介紹見工作流程。

進階
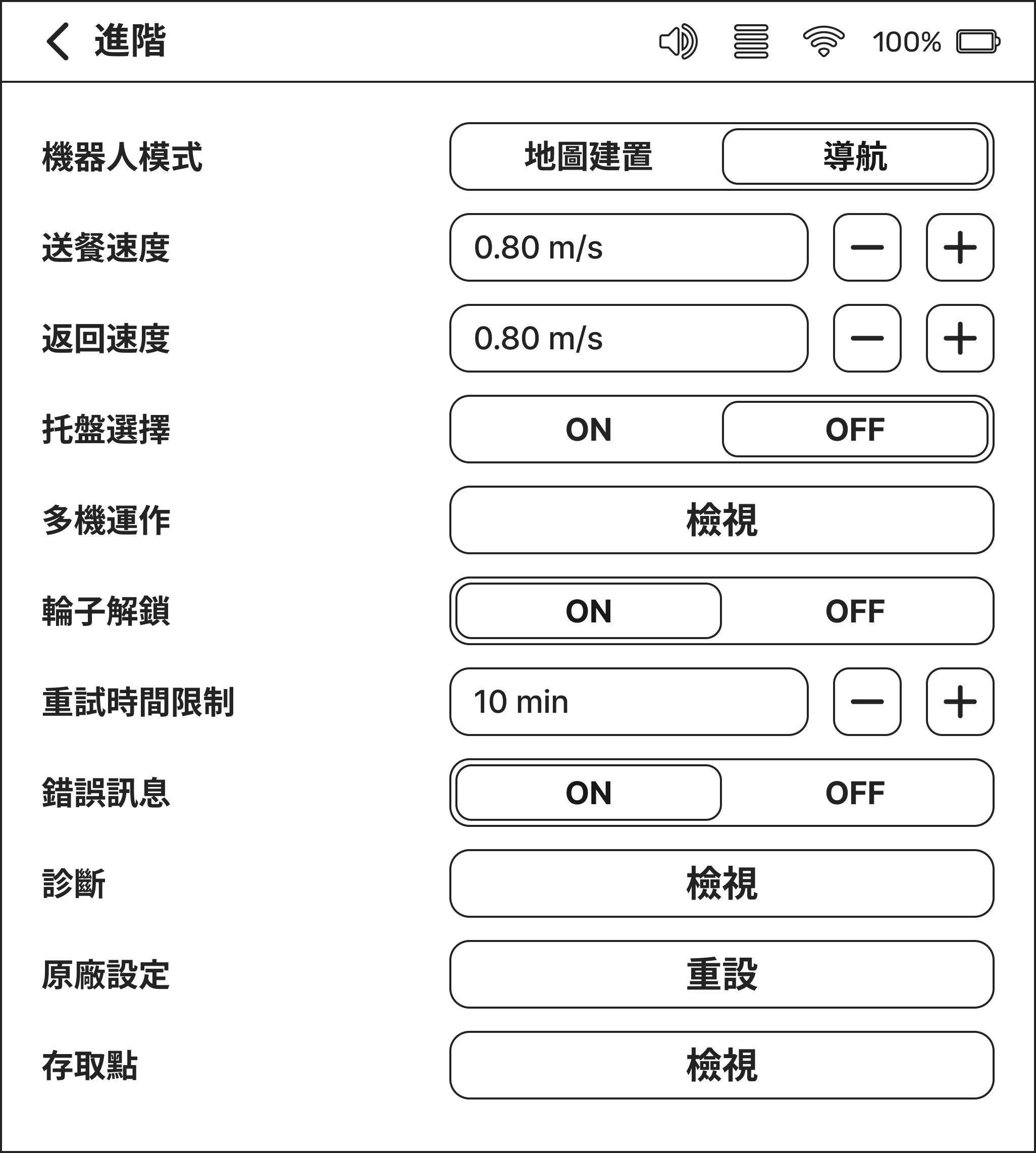
-
設定機器人的送餐模式。管理員需要映射地圖時使用映射功能。完成所有設定後使用 機器人時,默認為導航。
-
調節機器人的移動速度。請按地面等環境條件設定移動速度。配送湯類餐品時,請將移 動速度降至0.6m/s。
-
調節送餐後的返回速度。
-
根據是否選擇托盤,在首頁上顯示機器人圖像。若想直接選擇托盤,選擇ON,否則請選 擇OFF。
-
使用2台以上機器人時,點擊查看,即可查看多台機器人的詳細設定。
-
用於想用手推移機器人。
-
因感測器前的異物或障礙物等延遲送餐時,重試送餐所需的時間。
-
發生錯誤時螢幕上顯示。
-
軟體上出現BUG相關問題後,管理員用於發送問題報告。
-
初始化機器人。刪除已儲存的全部地圖和機器人資訊。
重新開機
用於重新啟動機器人。
前一頁下一頁Servi Plus Manual