로봇 설정
로봇의 일반적인 기능과 사용 환경을 설정할 수 있습니다.

일반

-
홈 화면의 디스플레이 방식을 설정합니다.
목적지: 목적지 이름이 표시됩니다.
키패드: 숫자 패드가 표시되어 목적지 이름을 직접 입력합니다.
-
원하는 언어로 설정합니다. 영어, 일본어, 한국어, 스페인어, 프랑스어, 독일어, 중국어 간체, 중국어 번체 순으로 표시됩니다.
-
로봇 이동 중에 일시정지 방법을 설정합니다.
싱글탭: 화면을 한 번만 누르면 로봇이 일시정지 합니다.
더블탭: 화면을 연속으로 두 번 누르면 로봇이 일시정지 합니다.
-
자주 사용하는 경로를 설정합니다. 경로를 만드는 법은 자주 쓰는 경로 를 참고하세요.
정보
로봇에 설치되어 있는 소프트웨어와 하드웨어 사양, 로봇에 설정되어 있는 위치와 맵 정보 등 상세 정보를 확인할 수 있습니다.
로봇 이름 옆의 변경을 누르면 로봇의 이름을 변경할 수 있습니다.

와이파이
로봇에 연결되어 있는 Wi-Fi를 확인할 수 있습니다.
목록 중 사용할 Wi-Fi 버튼을 눌러 비밀번호를 입력한 후, 연결을 누르세요.

로봇 위치 설정
목적지 위치를 재설정할 때 사용합니다. 로봇 재배치 시 설정한 목적지 지점에서 설치 기사가 설정한 방향까지 맞춰서 로봇 재배치를 진행해야 위치가 올바르게 재배치됩니다.
홈 화면에서 로봇이 서있는 위치에 재배치할 목적지를 길게 눌러도 위치 재설정이 가능합니다.

무게 센서 초기화
트레이에 이물질이나 작은 식기류가 남아있을 경우 로봇은 이를 무게로 인식하고 다음 목적지로 이동하지 않습니다. 만약 트레이를 깨끗하게 비운 후에도 동일한 상태가 계속되면 무게 센서를 초기화하세요.
각 트레이 버튼: 해당 트레이의 무게가 초기화 됩니다.
모두 초기화: 전체 트레이의 무게가 초기화 됩니다.

터치스크린 상단바의 사운드 아이콘을 길게 눌러도 전체 트레이의 무게를 초기화할 수 있습니다.
수동 운전
화면에 표시되는 화살표를 이용해 수동으로 로봇을 조작할 수 있으며, 손으로 직접 로봇을 밀어 이동시킬 수 있습니다. 또한 로봇의 바퀴가 잠겼을 때 수동 운전을 사용해 로봇을 원하는 장소로 이동할 수 있습니다.

[주의]
손으로 로봇을 직접 밀 때는 트레이 부분을 만지지 않도록 주의하세요. 무게 센서가 고장날 수 있습니다.
사운드
상황에 따라 음성이 설정되어 있습니다. 로봇의 이동음과 메시지 음량을 확인하고 조절할 수 있습니다.

또한 터치스크린 상단바의 사운드 아이콘을 길게 누르면 이동음과 메시지 음량을 조절할 수 있는 팝업이 표시됩니다.
동작 설정
동작 설정에 대한 자세한 설명은 로봇 사용법의 동작 설정을 참고하세요.

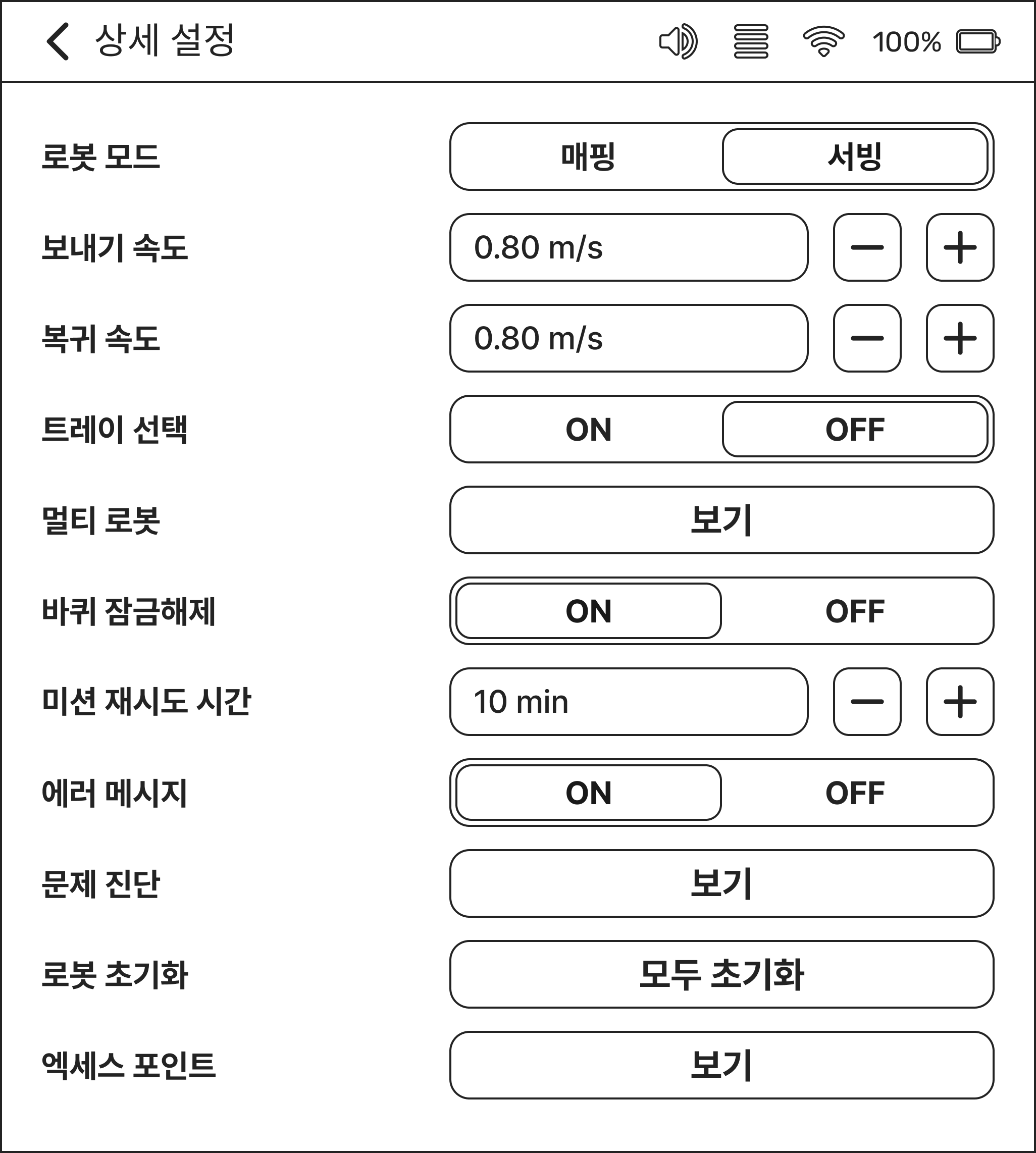
상세 설정
-
로봇의 서빙 모드를 설정합니다. 매핑은 관리자가 지도 매핑이 필요한 경우에 사용합니다. 기본적으로 모든 설정이 끝난 후 로봇을 사용할 때는 서빙으로 설정되어 있습니다.
-
로봇의 이동 속도를 조절합니다. 바닥 등의 환경에 맞게 주행 속도를 조절하세요. 만약 국물 요리를 서빙할 경우, 주행 속도를 0.6 m/s로 낮추세요.
-
서빙 후 복귀 속도를 조절합니다.
-
트레이 선택 여부에 따라 홈 화면에 로봇 이미지가 표시됩니다. 트레이를 직접 선택하기를 원하면 ON, 그렇지 않으면 OFF로 설정하세요.
-
로봇을 2대 이상 사용할 때 보기를 눌러 멀티 로봇의 세부 설정을 볼 수 있습니다.
-
로봇을 손으로 밀어 이동시키고 싶을 때 사용합니다.
-
센서 앞에 이물질이나 장애물 등으로 서빙이 지연될 때 로봇이 서빙을 재시도하기까지 걸리는 시간입니다.
-
에러가 발생했을 때 화면에 표시됩니다.
-
관리자가 소프트웨어에 버그 관련 문제가 발생하여 리포트를 보낼 때 사용합니다.
-
로봇을 초기화합니다. 저장되어 있는 지도와 로봇의 모든 정보가 삭제됩니다.
재시작
로봇을 재시작할 때 사용합니다.

이전 페이지다음 페이지Servi Plus Manual