Réglages du robot
Vous pouvez définir les fonctions générales et utiliser l’environnement du robot.

Général

-
Définissez la configuration de l’écran d’accueil.
Table: Affiche le nom du tableau.
Pavé numérique: Un pavé numérique s’affiche pour vous permettre de saisir le nom du tableau.
-
Vous pouvez modifier la langue d’affichage. L’anglais, l'espagnol, le français, l'allemand, le japonais, le coréen, le chinois simplifié et le chinois traditionnel sont disponibles.
-
Activez la fonction Pause pendant le mouvement du robot.
Appuyer une fois: Le robot s’arrête si vous appuyez une fois sur l’écran.
Appuyer deux fois: Le robot s’arrête si vous appuyez deux fois de suite sur l’écran.
-
Définissez des parcours fréquemment utilisés. Pour la procédure de création de parcours, référez-vous à Réglage des parcours
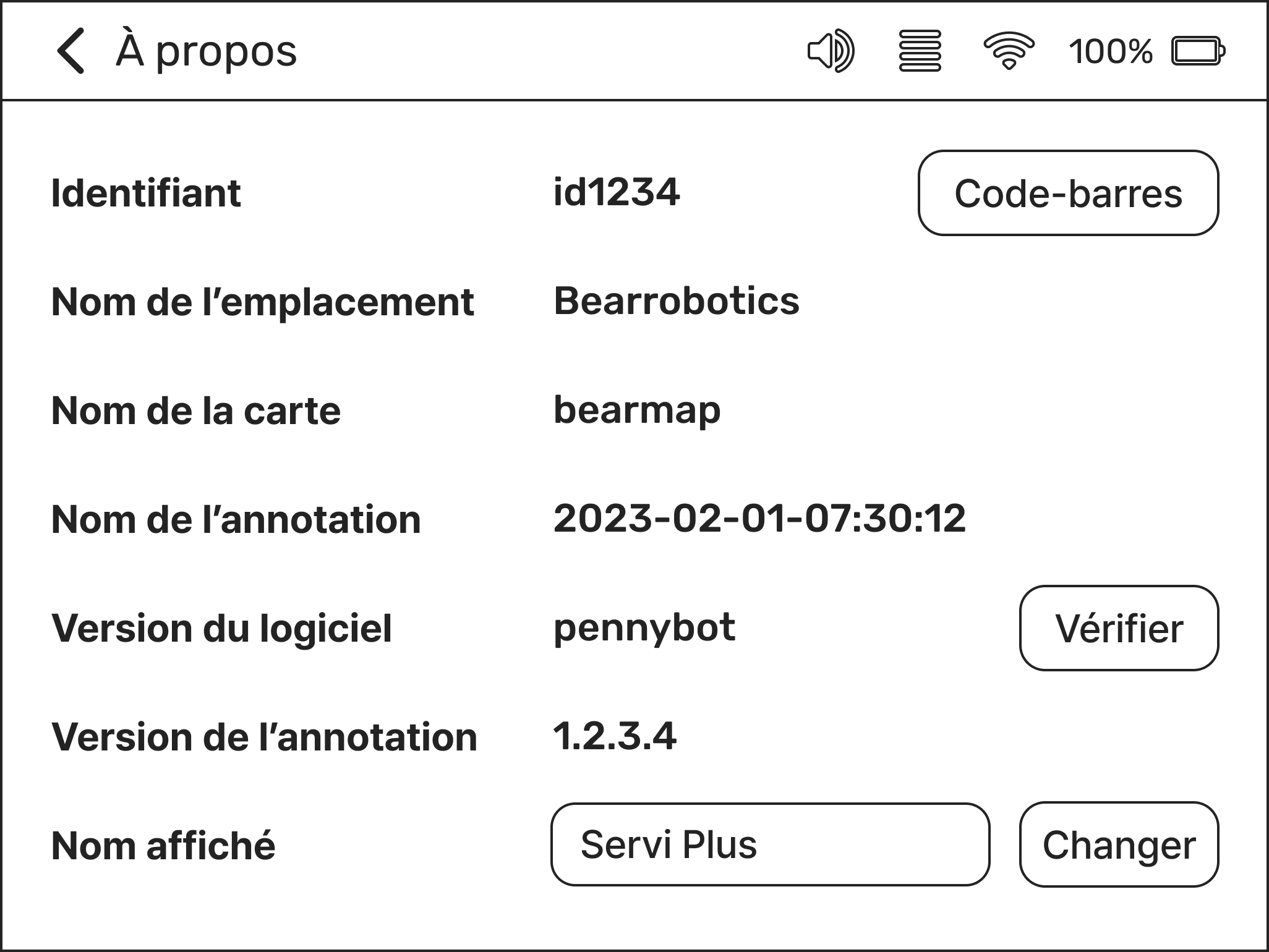
À propos
Vous pouvez vérifier les informations relatives au robot, telles que les spécifications du logiciel et du matériel installés sur le robot, ainsi que les emplacements et les cartes définis sur le robot.
Vous pouvez renommer le robot en appuyant sur Changer à côté du nom du
robot.
Wi-Fi
Vous pouvez vérifier les connexions sans fil disponibles pour le robot.
Appuyez sur le réseau sans fil que vous souhaitez utiliser dans la liste, entrez le mot de passe et appuyez sur Connecter.

Localisation
Cette fonction permet de réinitialiser l’emplacement de la destination. Lorsque vous déplacez le robot, veillez à le déplacer à la même destination et dans la même direction (celles définies par notre ingénieur d’installation) afin de garantir la précision du déplacement.
Pour un déplacement rapide, appuyez longuement sur la destination sur l’écran d’accueil et le robot s’y déplacera.

Mettre le poids à zéro
Si des objets étrangers ou de la petite vaisselle sont laissés sur le plateau, le robot les reconnaît et ne se déplace pas vers la destination suivante. Si la même situation persiste une fois le plateau vidé, réinitialisez le capteur de poids.
Bouton du plateau: Réinitialise le poids du plateau.
Tout réinitialiser: Réinitialise tous les plateaux.

Vous pouvez également réinitialiser tous les plateaux en appuyant longuement sur l’icône de la barre de menus de l’écran tactile.
Commande manuelle
Vous pouvez faire fonctionner le robot manuellement en utilisant les flèches affichées à l’écran, et/ou en poussant et en déplaçant le robot avec vos mains. De plus, lorsque les roues du robot sont bloquées, vous pouvez utiliser la commande manuelle pour déplacer le robot vers l’emplacement souhaité.

[Attention]
Lorsque vous poussez le robot avec vos mains, veillez à ne pas toucher la section du plateau, car le capteur de poids risque de tomber en panne.
Son
Des messages vocaux contextuels sont définis.
Vous pouvez vérifier et régler le son du mouvement du robot et le volume du message.

Vous pouvez aussi afficher un message contextuel en appuyant longuement sur l’icône de la barre supérieure, où vous pouvez régler le volume du son des mouvements et des messages.
Flux de travail du robot
Pour des informations détaillées sur le Flux de travail du robot, référez-vous à Réglage du flux de travail du robot.

Avancé

-
Vous pouvez définir le mode de service du robot. La cartographie est utilisée par les administrateurs lorsqu’elle est nécessaire. Par défaut, elle est définie sur Navigation lors de l’utilisation du robot après le réglage.
-
Vous pouvez régler la vitesse de déplacement du robot. Ajustez la vitesse d’entraînement en fonction des conditions environnementales telles que l’état du sol. Si le robot sert un plat de soupe, réduisez la vitesse d’entraînement à 0,6 m/s.
-
Ajuster la vitesse de retour après le service.
-
Une image de robot s’affiche sur l’écran d’accueil en fonction de la sélection de plateaux. Si vous souhaitez sélectionner manuellement le plateau, réglez cette fonction sur ON, sinon sur OFF.
-
Si vous utilisez 2 robots ou plus, appuyez sur Afficher pour accéder aux paramètres détaillés du mode Multi-Robot.
-
Cette fonction vous permet de déplacer le robot en le poussant avec vos mains.
-
il s’agit du temps nécessaire au robot pour essayer à nouveau de servir lorsqu’il est retardé par des corps étrangers sur sa trajectoire ou lorsqu’il y a des obstacles devant le capteur.
-
Un message d’erreur s’affiche à l’écran lorsqu’une erreur se produit.
-
Il est utilisé par les administrateurs pour signaler les problèmes de logiciel.
-
Réinitialise le robot. Toutes les cartes et les informations sur le robot sauvegardées seront supprimées.
Redémarrer
Permet de redémarrer le robot.

Page PrécédentePage SuivanteServi Plus ManualMode d’emploi