Mode d’emploi
À vérifier avant l’utilisation
Vous trouverez ci-dessous les conditions environnementales recommandées pour le fonctionnement du robot.
La plage de températures de fonctionnement optimale du robot est de 50 –95 ̊F (10 – 35 ̊C), et la plage d’humidité optimale est de 10 – 80 %.
Utilisez le robot dans un espace intérieur dépourvu d’humidité et bien ventilé.
Utilisez le robot sur un sol plat sans vibrations ni risques de chocs.
Dégagez la trajectoire de déplacement du robot.
Couverture – Espace et reconnaissance
Vous trouverez ci-dessous la couverture du robot, y compris la portée minimale de mouvement et de reconnaissance.

TLa largeur minimale de passage du robot est de 65 cm (25,6 po.). Veillez à laisser suffisamment d’espace pour que le robot puisse se déplacer en toute sécurité.
Le robot utilise un capteur LiDAR 2D et un capteur de profondeur 3D pour détecter les objets et calculer leur distance et leur emplacement.
– Le capteur LiDAR 2D (identification, détection et télémétrie par laser) détecte les objets environnants et mesure des informations telles que la distance, la direction et la vitesse par rapport à la cible. La plage de mesure maximale du capteur LiDAR 2D est de 20 m (65,6 pi) avec une couverture de 230°.
– Le capteur de profondeur 3D mesure la distance par rapport aux objets environnants. La plage de mesure du capteur de profondeur 3D est de 2,5 m (8,2 pi.).
Les obstacles placés en dehors de la plage de mesure de la caméra ou de la plage de reconnaissance du capteur étant difficiles à détecter par le robot, veillez à les retirer de la trajectoire du robot. Voici quelques exemples d’obstacles que le robot peut avoir du mal à détecter :
– Les petits objets d’une épaisseur inférieure à 5 cm, les petites bosses ou marches sur le sol
– Les objets suspendus ou flottant dans l’air, tels que les luminaires ou les dispositifs d’éclairage mobiles
– Les objets en miroir ou en verre
Mise en marche/arrêt
Le bouton d’alimentation du robot se trouve dans le coin inférieur droit du corps de l’appareil.
Ouvrez le capot de charge et appuyez sur le bouton d’alimentation noir situé à gauche pour allumer le robot.
L’écran de démarrage s’affiche sur l’écran tactile, et les voyants des montants et de la base s’allument.
Pour éteindre le robot, appuyez sur le bouton d’alimentation et maintenez-le enfoncé pendant 5 secondes.

Charger le robot
Les instructions ci-dessous décrivent la procédure de recharge de la batterie du robot.
[Attention]
Veillez à utiliser l’adaptateur de charge et les composants fournis pour charger la batterie. Le non-respect de cette consigne peut endommager le robot ou la batterie.
Il est recommandé de charger la batterie dans un endroit où la prise d’alimentation peut être facilement débranchée en cas d’urgence.
| Niveau de charge de la batterie
Le niveau de charge de la batterie peut être vérifié dans le coin supérieur droit de l’écran.
Lorsque la batterie est faible, le message « Le niveau de batterie est faible » s’affiche à l’écran et une notification vocale est émise simultanément.

| Comment charger
Ouvrez le capot de charge situé au bas du corps principal du robot.
Insérez l’adaptateur de charge dans la borne de charge du robot et branchez la fiche d’alimentation dans la prise de courant. Branchez le chargeur et tournez-le vers la droite. S’il y a un déclic, c’est que la charge a commencé.
※ Le même chargeur peut être utilisé pour le Servi et le Servi Plus.

Arrêt d’urgence
Si un objet ou une personne apparaît soudainement devant le robot, appuyez sur le bouton d’arrêt d’urgence.
L’activation de l’arrêt d’urgence entraîne le blocage des roues.
Pour débloquer l’arrêt d’urgence, tournez le bouton d’arrêt d’urgence vers la droite (vers la flèche).
Après le relâchement de l’arrêt d’urgence, toute mission en cours est et l’écran tactile affiche le message « Mission échouée ». Retournez sur l’écran d’accueil en appuyant sur le bouton Aller à la page d’accueil et insérez une nouvelle destination. Cette opération permet de relâcher le blocage des roues.

Si le robot fonctionne mal ou émet des bruits ou des odeurs étranges ou encore de la fumée, appuyez sur le bouton d’arrêt d’urgence et appuyez sur le bouton d’alimentation et maintenez-le enfoncé pendant 5 secondes.
Utilisation des plateaux
Quatre plateaux sont fournis par défaut avec le robot, mais le nombre et l’emplacement des plateaux peuvent être modifiés. Vous pouvez demander à notre technicien d’installation de modifier le nombre de plateaux.

[Remarque]
Ne modifiez pas arbitrairement l’emplacement des plateaux. Cela peut entraîner un dysfonctionnement.
À propos des voyants

Situé à proximité du plateau supérieur, l’affichage personnalisé à trois faces affiche des messages d’orientation.
| Affichage personnalisé à 3 faces

Il permet d’identifier le plateau contenant les aliments commandés. Lorsque le robot arrive à la table, l’éclairage des deux côtés du plateau contenant les aliments commandés par le client s’allume.
| Voyant du montant

Chaque plateau est éclairé pour permettre aux utilisateurs de reconnaître facilement leurs portions. L’éclairage du plateau s’allume lorsque des aliments sont chargés.
| Voyant pour les aliments

Il est situé à la base du robot et sa couleur change en fonction de l’état de fonctionnement du robot.
| Voyant de la base
[La couleur de voyant de la base]
Amorçage
Veille
En fonctionnement
Arrêt d’urgence
Amorçage
Veille
En fonctionnement
Arrêt d’urgence
Charge en cours
Charge complète
Interblocage
Multi-Robot
Charge en cours
Charge complète
Interblocage
Multi-Robot
Arc-en-ciel
Bleu
Vert
Rouge
Arc-en-ciel
Bleu
Vert
Rouge
Jaune
Vert
Orange
Pourpre
Jaune
Vert
Orange
Pourpre
Utilisation de Servi Plus
| Préparation à l’utilisation
Pour utiliser le robot, vous devez l’avoir enregistré et avoir réalisé le processus de cartographie en suivant les instructions sur l’écran tactile.
Bear Robotics propose un service basé sur le cloud qui comprend la surveillance du robot, le flux de travail du robot, le guide du robot et les mesures de dépannage à tout moment et en tout lieu.
Pour installer le robot, vous devez vous inscrire à Universe, le système de gestion de Servi. Veuillez contacter Bear Robotics pour la procédure d’inscription.
Pour utiliser le robot, vous devez l’enregistrer et effectuer un processus de cartographie. Veuillez compléter la configuration initiale en suivant les instructions sur l’écran tactile.
| Réglage initial du robot
Mettez le robot en marche et enregistrez-le en suivant les instructions sur l’écran tactile. Créez un lieu dans Universe et terminez l’enregistrement en saisissant le code à 4 chiffres affiché sur l’écran tactile.
○ Étape 1. Enregistrer un robot

Conduisez le robot en suivant les instructions sur l’écran tactile pour lui permettre de cartographier le sol à l’aide de ses caméras et du LiDAR. Vous trouverez ci-dessous la séquence de cartographie.
○ Étape 2. Démarrer la cartographie

Vous pouvez ajouter des destinations sur l’écran tactile ou dans Universe.
[Attention]
Placez le robot près d’un mur avant d’appuyer sur le bouton Démarrer la cartographie. Si le mur est transparent ou si le robot part d’un autre endroit, l’image cartographique obtenue peut présenter des distorsions.
Terminez la cartographie sur l’écran tactile, sélectionnez l’onglet Maps (Cartes) dans Universe et actualisez la page (F5). Vous pouvez voir l’image de la carte et la destination prise par le robot.
Spécifiez les tables, les chaises et les espaces restreints dans la boîte à outils pour mieux définir la portée.
○ Étape 3. Terminer la cartographie

Appuyez sur le nom du robot dans le coin supérieur gauche de l’écran tactile et maintenez-le enfoncé (2 à 3 secondes) pour accéder à l’écran Paramètres.
○ Étape 4. Accéder aux paramètres

Définissez la carte et les emplacements de service, puis passez à Localisation pour faire comprendre au robot où il se trouve. Vérifiez si la destination correspond à l’emplacement où se trouve le robot, appuyez sur la destination, et appuyez sur le bouton Confirmer.
Vous pouvez également faites un appui long sur la destination sur l’écran d’accueil pour déplacer votre robot.
○ Étape 5. Localiser un robot
| Paramètres de sélection des plateaux
Allez à Réglages > Avancés. Vous pouvez activer ou désactiver la sélection des plateaux en fonction des conditions de service ou de vos préférences.

Sélection du plateau
OFF: Il s’agit de la valeur par défaut. Le robot livre à la destination sans sélection séparée des plateaux. Les noms des destinations sont affichés dans l’ordre.
ON: Vous pouvez activer différents plateaux pour différentes destinations. Configurez et passez à l’écran d’accueil où vous trouverez une image de robot apparaissant sur la droite où vous pouvez sélectionner un plateau.


<Sélection du plateau: OFF>
<Sélection du plateau: ON>
○ Écran par défaut du flux de travail du robot
Servi Plus aide à la livraison et au débarrassage dans différents modes. Vous pouvez le configurer pour différents modes, y compris le service, le débarrassage, etc. Sur l’écran initial, la sélection du plateau est désactivée. Pour modifier le comportement, suivez les instructions ci-dessous.
| Réglage du flux de travail du robot
Accédez à Réglages > Flux de travail.
L’image ci-dessous montre l’écran Flux de travail du robot avec les paramètres par défaut.

-
Service: Il s’agit d’une valeur par défaut.
Débarrassage: Même si vous avez défini la sélection du plateau,
l’image du robot ne s’affiche pas sur l’écran d’accueil. Si vous saisissez une destination de débarrassage, les noms des destinations sont répertoriés à droite.
-
Table: Il s’agit d’une valeur par défaut.
Patrouille: Même si vous avez défini la sélection du plateau, l’image du robot ne s’affiche pas sur l’écran d’accueil. Les noms des destinations apparaissent dans l’ordre à droite. La sélection de Patrouille désactive l’élément de Retour.
-
Lorsque le robot arrive à la table, il émet le message vocal suivant : « Vous pouvez prendre vos plats ». Vous pouvez le désactiver en le mettant sur OFF.
-
Ce message est utilisé si un type de débarrassage ou une station est sélectionnée en mode service.
Si un utilisateur charge quelque chose sur le plateau et que le robot détecte le poids, le message suivant s’affiche : « Merci ». Vous pouvez l’activer ou le désactiver (ON/OFF).
-
Le mode Automatique est activé par défaut et il permet au robot de se déplacer à l’emplacement de retour défini après le service.
-
Il s’affiche lorsque l’utilisateur sélectionne le type de débarrassage et ensuite une station en mode service. Vous pouvez également spécifier le lieu de retour (Retourner à).
-
Pour remplacer l’emplacement de retour, appuyez sur Changer et sélectionnez une destination enregistrée.
-
S’il est activé ON, le robot commence la livraison suivante lorsque le plateau est déchargé.
-
Le type de débarrassage est modifié de Plateau vide à Plateau plein.
-
Le minuteur définit la durée pendant laquelle le robot reste à une destination. Pour activer le minuteur, appuyez sur ON et définissez l’heure de retour (Retourner après). Vous pouvez le désactiver en le mettant sur OFF.
-
Le robot commence à se déplacer vers la destination suivante après l’heure de retour désignée, qui peut être définie à l’aide du minuteur.
Utilisation du flux de travail du robot
| En service
Pour plus d’informations sur les caractéristiques du Flux de travail du robot, référez-vous à Réglage du flux de travail du robot.
○ Désactivation de la sélection du plateau
L’écran par défaut du Flux de travail du robot. Entrez la destination et appuyez sur le bouton ALLER.

L’écran affiche l’écran par défaut du Flux de travail du robot avec la sélection de plateaux activée ON. Entrez la destination et appuyez sur le bouton ALLER.
○ Activation de la sélection du plateau

L’ordre de service est automatiquement attribué de haut en bas, mais vous pouvez désigner une destination de service en sélectionnant le plateau souhaité.
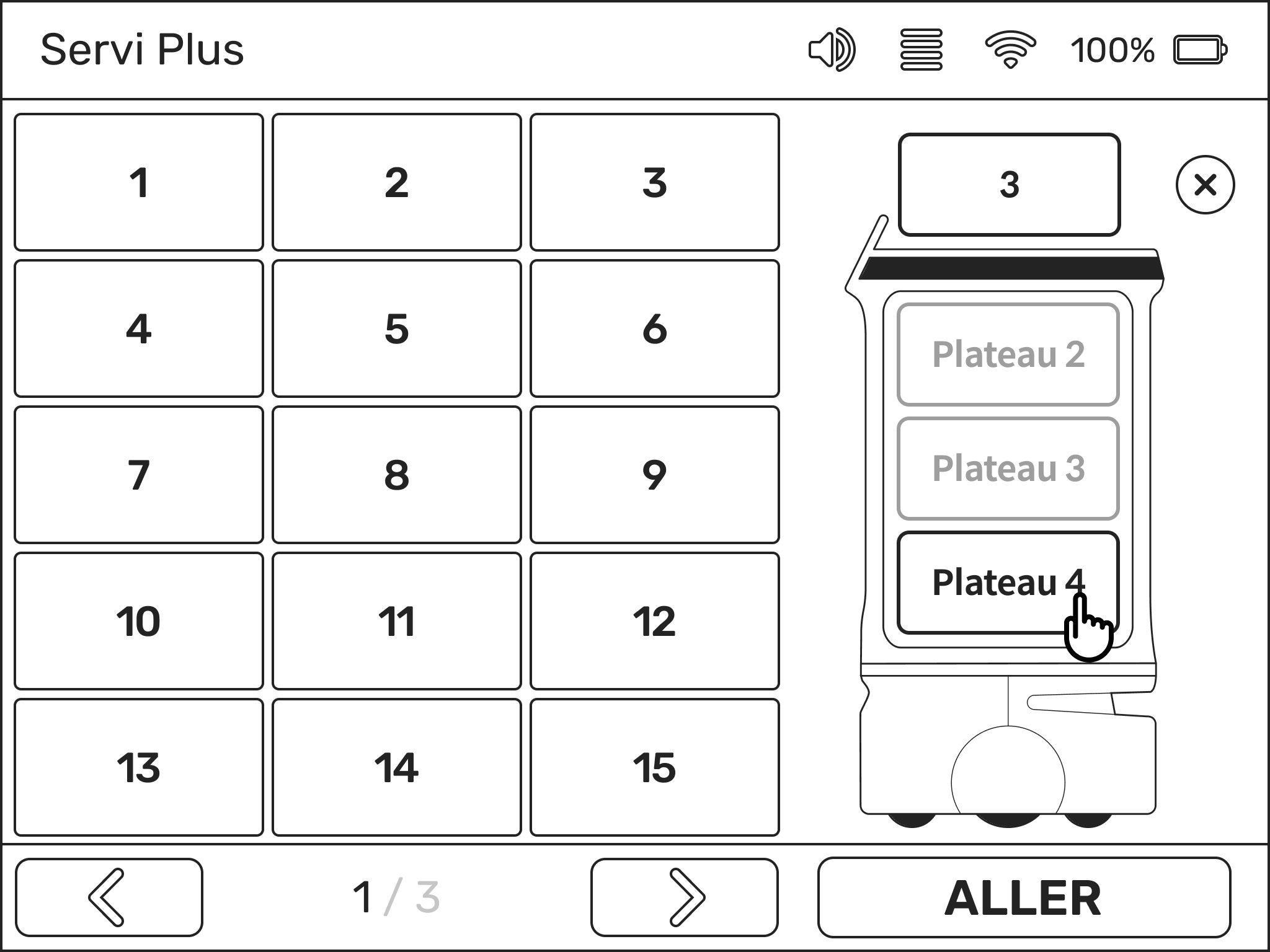
Si vous avez entré une mauvaise destination pour le plateau, appuyez à nouveau sur le plateau pour entrer la bonne destination.

| Débarrassage
Voici l’écran du Flux de travail du robot avec le mode de débarrassage par défaut.

-
Le robot se déplacera vers une station prédéfinie chaque fois qu’il aura terminé le débarrassage.
-
Si un utilisateur charge quelque chose sur le plateau et que le robot détecte le poids, le message suivant s’affiche : « Merci ». Vous pouvez l’activer ou le désactiver (ON/OFF). Cependant, le message vocal est déclenché indépendamment de ce réglage [qu’il soit activé (ON) ou désactivé (OFF)], lorsque le robot quitte la destination.
-
Cette fonction permet de désigner des points spécifiques à utiliser comme stations.
[Attention]
Si Station à est défini sur Manuel, les points configurés ne sont pas utilisés.Pour utiliser la station, appuyez sur le bouton Changer et configurez la station (Station à).
Une fois cela terminé, revenez à l’écran d’accueil et vous verrez la station s’afficher.
Lorsqu’une destination est sélectionnée, la station est inscrite comme dernier point.
-
Le robot retourne à l’emplacement de retour s’il détecte un élément pesant plus de 10 kg (22 lb) avec le capteur de poids pendant le débarrassage.
-
Définissez la durée pendant laquelle le robot reste à une destination. Lorsqu’il est réglé sur OFF, le robot reste à la destination jusqu’à ce que le plateau soit plein lors du débarrassage. Le bouton Ignorer permet au robot de se déplacer ou de retourner à l’emplacement suivant.
| Réglage des parcours
Le Réglage des parcours active la Patrouille dans le mode service du Flux de travail du robot.
○ Réglages
Faites un appui long sur le coin supérieur gauche de l’écran pendant 2 à 3 secondes.
Accédez à l’écran Réglages.
Appuyez sur GÉNÉRAL dans le coin supérieur gauche de l’écran.
Appuyez sur Créer des parcours pour afficher l’écran de création de parcours. Créez un parcours en suivant les instructions à l’écran.
Après avoir créé le parcours, retournez à l’écran précédent et activez les Parcours (ON).


Appuyez sur les destinations pour entrer les parcours dans l’ordre.
Si vous trouvez une destination inexacte, vous pouvez la supprimer en appuyant sur ⓧ à côté du nom de la destination.
Après avoir inséré toutes les destinations, appuyez sur ENREGISTRER.
Après avoir saisi le nom du parcours, appuyez sur ENREGISTRER.
Le parcours créé s’affiche dans le coin supérieur gauche de l’écran d’accueil.
○ Création


Vous pouvez modifier le nom du parcours.
Sur l’écran Création de parcours, appuyez sur ( - ) dans le coin inférieur gauche.
Appuyez sur le parcours que vous souhaitez renommer, puis sur MODIFIER.
Saisissez le nom du parcours et appuyez sur ENREGISTRER.
○ Modification


○ Suppression
Vous pouvez supprimer des parcours.
Sur l’écran Création de parcours, appuyez sur ( - ) dans le coin inférieur gauche.
Appuyez sur le parcours que vous souhaitez supprimer, puis sur SUPPRIMER.
Un message de confirmation apparaît.
Cochez la case de droite ( ✓ ) pour continuer.
Appuyez sur le ( x ) de gauche pour annuler la suppression.


Messages d’état
Un message d’état s’affiche à l’écran lorsque le robot ne peut pas effectuer une mission en raison d’un obstacle sur sa trajectoire ou lorsqu’une erreur de position se produit. Dans ce cas, le voyant situé à la base du corps principal du robot devient rouge, orange et jaune.
Status Message & Required Actions
Je suis coincé

Déplacez le robot à l’endroit où il a commencé à servir.
Éliminez tout obstacle sur la trajectoire du robot et poussez manuellement le robot pour le repositionner.
Vérifiez si un corps étranger se trouve devant le capteur de la caméra.
Message d’état
Arrêt d’urgence
Écran
Actions requises
Je suis coincé
La mission a échoué
Batterie faible
Arrêt d’urgence

Vous pouvez activer l’arrêt d’urgence en cas de problème pendant le fonctionnement
du robot. Si vous appuyez sur le bouton rouge situé au bas du robot, celui-ci s’arrête de fonctionner. Tournez le bouton dans le sens de la flèche (vers la droite) pour libérer l’arrêt d’urgence.
Batterie faible

Lorsque le niveau de charge de la batterie atteint 10 %, le message « Batterie faible » apparaît à l’écran et un message vocal est déclenché.
Pour la procédure de recharge de la batterie, référez-vous à Charger le Robot.
La mission a échoué

Ce message apparaît lorsqu’une mission échoue pour diverses raisons.
Lorsque l’arrêt d’urgence est activé et désactivé ensuite pendant une mission.
En cas de problèmes de réseau ou de caméra
Lorsqu’un robot se perd, etc.
Les missions existantes sont annulées. Retournez donc à l’écran d’accueil et commencez-en une nouvelle.
Page PrécédentePage SuivanteServi Plus Manual